久々にオレオレ理論シリーズネタを追加!(笑)
今まで、メカ(アンプ、モーター)なんて何でもいいじゃんと思ってここまできたけど、ここ最近の研究(笑)により、こういうことか?ってことが見えてきたので書きます(笑)
大したこと書いてませんし、信じるかどうかはあなた次第(笑)
長文なので、暇で暇で仕方ないときにご覧ください(笑)
モーターについて
まずはモーターから。
私の持っているモーターは、以下の通りです。
① REVED ABSOLUTE1 13.5T KV値:2653
② G-FORCE 龍神 10.5T KV値:3600
③ ヨコモ D1 10.5T KV値:3810
私はホームサーキットがタムタム名古屋(かなり食うアスファルト)で、車速重視、浅角上等なスタイルでして(笑)、圧倒的に①が扱いやすいです。
②、特に③は加速が悪い印象です。
一般的には、ターン数(T)が小さい、またはKV値が大きいと、パワー(以下、あえて実車っぽく「馬力」といいます)が大きくトルクが小さくなります。
これらはコイルの巻き数(ターン数)やコイルの太さ、ローターの太さなどで決まってきますが、ターン数以外はメーカーが公表していない場合もあり、自分で計測器を用いて測定しないと分からないことがあります(なかなか計測器なんて持ってないと思いますが)。
また、進角の設定によっても馬力、トルクは変わり、ここらへんの理論を語ると、きっと物理の勉強みたいなつまらん内容になってしまいますし、そもそも知りません(笑)
簡単にいうと、馬力が大きくトルクが小さいと、実車だと加速は良くないけど最高速が高くなるということになります。馬力が小さくトルクが大きいと、もちろんその逆になります。
ただ、ラジドリの世界だと、タイヤがすぐチュルチュル滑っちゃうので、馬力やトルクがあってもドリフトしてしまって車速が一定までしか上がらなかったり、加速が悪く感じる場合があり、扱い方次第なところがあります。
なお、ラジコンは実車と違い、変速ギアや実車のような状況に応じた複雑な自動電子制御機能はないので、基本は馬力とトルクは背反します。
ここからがオレオレ理論です(笑)
ここまでの話はあまり関係ないかも?!(笑)
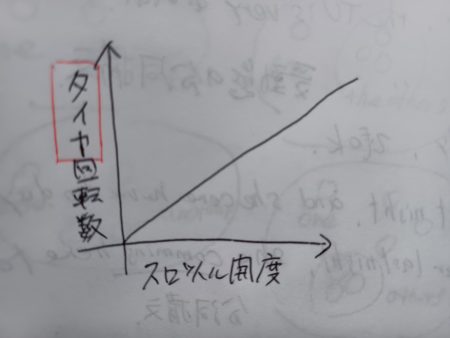
いきなりオレオレな結論ですが、扱いやすいモーターは、下図のような特性のモーターです!(笑)
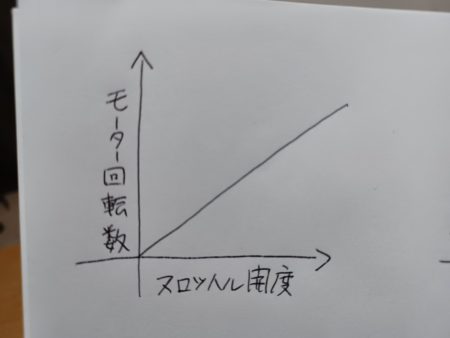
割と素早い一定速度でスロットルを操作した場合を想定したグラフです。
ようは、スロットル開度に比例して、モーター回転数が上がるモーターです。
また、モーターやタイヤを空転させて計測するのではなく、シャーシにモーターを付けて実際に走行しているとき(負荷が掛かっているとき)のモーター回転数です。
実際に計測したわけではないので知らんのですが(笑)、恐らく①のモーターは、かなり直線的に比例しているのではないかと思います。
一方、②や③は、こんな感じだと思います。
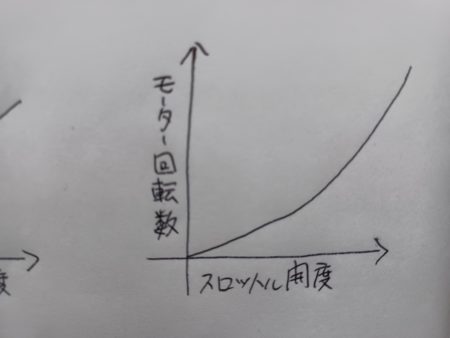
ようは、比例ではなく、二次曲線的な感じかと。
また、②と③の体感的な感覚として、KV値が高くなればなるほど、曲線になっていく印象です。低速時はトルクが足りず、回転が鈍くなっていて、徐々に出遅れて上がっていき、後半に馬力の仕業で極端に上がっていきます。
曲線的になっていくと、スロットルと回転数の関係がリニアではないため、おてての感覚だけでは上手くタイヤの回転数を路面に合わせられず、ムダに空転させたり回転不足になったりします。
結果、コーナー立ち上がりで空転により他車に置いていかれたり、振り出しで回しすぎてスピンしたりします。
じゃあ、13.5Tの一択じゃね?と思われたかと思いますが、実はこの特性は路面によって変わるんです。
オレオレ理論としては、以下の図のような感覚です。
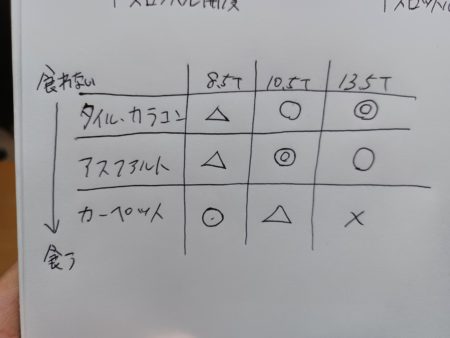
つまり、広くは10.5Tモーターがよいと思いますが、どうやらカーペットだけは路面抵抗が特殊のようで、ブン回しても馬力不足でまともに走れなくなるというそもそもの課題が出るため、カーペットだけは10.5T以下の(KV値が大きい)モーターがオススメです。
あとは先に述べたように、比例的に回転が上がるモーターかどうかですね。カーペットは非力ではどうしようもないので、曲線的な低ターン数のモーターを選ばざるを得ないという感じです。
色々書きましたが、実は私が今回一番言いたいことは、「モーターは何でもいいなんていうことはない。しっかり選んで買うべき」ということです(笑)。
具体的な数値は分からないし説明もようせんのですが(笑)、とにかく何でもよいということはないです。
進角やらアンプやらプロポやらで調整できますが、いずれも実車と比べれば極めて単調で独立した機能なので、きれいな線形にならず、下図のように非線形で感覚として理不尽で意味の分からんスロットル開度とタイヤ回転数の関係になりやすいです。
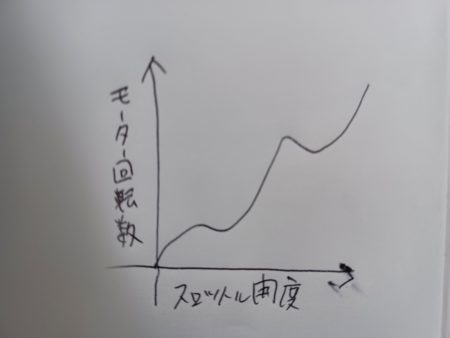
メーカーの宣伝内容だけでは分からない事なので、買う前に、周りの知人やメーカーのお試し会でモーターを借りてみて相性を見れると一番いいと思います!
アンプについて
私の持っているアンプは、以下の通りです。
①フタバ MC970CR
②ヨコモ レーシングパフォーマー RPX-Ⅱ
③ヨコモ BL-RS4
④ヨコモ BL-SP4
アンプは、スロットル開度などをもとに、モーターへ電力を供給するわけですが、これもまたスロットルに比例した電力供給できるものがベストだと考えます。
その意味では、①がダントツという印象です。計測したわけではないから実際の波形は知らんけど(笑)
アンプは、ブースト、ターボ、アクセレーションとかドライブ周波数とかの設定により、スロットル操作に対する挙動を変えられますが、モーター同様、スロットルに対し比例した電力供給が比例するように調整できるズバリな設定はないため、基本は製品で決まってしまうのではないかと経験上察しました。
よって、モーター同様、単純にパワーがある・ないだけではないため、「アンプは何でもいいなんていうことはない。しっかり選んで買うべき」ということになります。
この辺はやはり走行しないと分からないため、買う前に試すのがベストです。
この前提条件になりますが、そもそも安定した電力供給ができるかどうかも製品毎に決まってくると推測されます。
安定した電力供給ができないと、やはりムダな空転や回転不足になるため、理想的な走りはおててでいくら頑張っても厳しいでしょう。
安定した電力供給という意味では、大きな電力に耐えられる(余力のある)アンプほど安定する傾向のため、どうしても製品価格が高いものほど安定する傾向です。
これらは、「瞬間・連続最大電流」が大きいアンプ、対応モーターの「最小ターン数」が小さいアンプほど優れていると言えるかと思いますので、購入前にカタログ値で判断できます。
あ、今気づきましたが、④は13.5T以上推進と説明書に書いてありました。。。私は10.5Tでターボ、ブーストも使っていたため、そりゃ電力不安定にもなりますわな(笑)
最後に
スロットル開度とタイヤ回転数の関係には、モーターとアンプが絡んでいますので、どちらも比例的に回転数が上がるものを選んで初めて比例的にタイヤが回転するということになります。
モーターとアンプ、どちらかがイマイチだと車としてイマイチなります。
繰り返しになりますが、モーターもアンプも安い買い物ではないので、周りの方の試乗やメーカー試乗会などで実際に体感してから満を持して購入されることをオススメします!